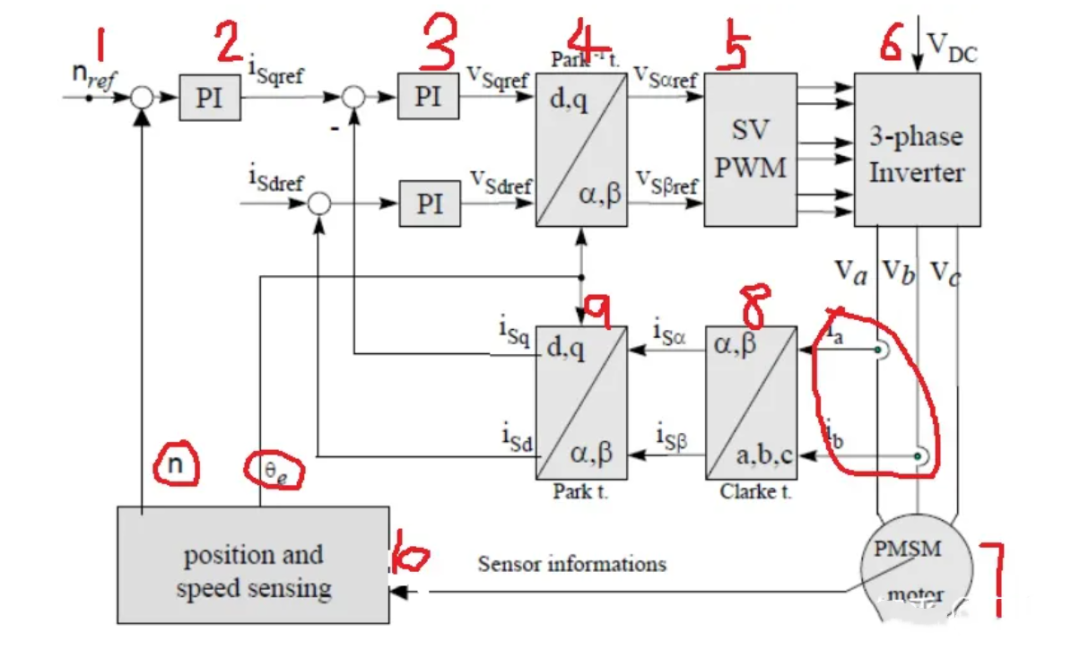
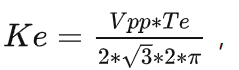
כאשר Te=60/(n*p), n הוא יחידת המהירות המכנית סל"ד, ו-p הוא מספר זוגות הקטבים.אם המנוע שומר על 1000 סיבובים, n שווה ל-1000.
זמן פרסום: 28-3-2023
כאשר Te=60/(n*p), n הוא יחידת המהירות המכנית סל"ד, ו-p הוא מספר זוגות הקטבים.אם המנוע שומר על 1000 סיבובים, n שווה ל-1000.